







Контроллер шагового двигателя.
Микросхема контроллера: Toshiba TB6560- ток удержания 25%,50%,100% в процентах от тока номинального драйвера
- ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера
- Режимы шагов двигателя (микрошаг) 1, 1/2, 1/8, 1/16
Максимальный ток: 3А (3,5 А в пике)
Рабочее напряжение: 10-35 Вольт
Полная гальваническая развязка
Рабочий режим настраивается с помощью переключателей
TB6560 V2 - драйвер управления двухфазными шаговыми двигателями выполнен на специализированном чипе Toshiba TB6560AHQ с питанием 10В – 35В постоянного напряжения, предназначен для использования с двигателями типа NEMA17 – NEMA23 с максимальным током фазы до 3 А.
Широко используется в ЧПУ системах.
Особенности:.
- Напряжение питания 10 В – 35 В постоянного напряжения;- Оптоизолированные входы сигналов управления;
- Делитель шага (микрошаг) – 1,2,8,16;
- Установка максимального тока – 14 ступеней.
Основные характеристики:
Входное напряжение 10-35 В постоянного напряженияВыходной ток 0.3 A..3 A (в пике 3.5 А макс.)
Температура эксплуатации - от -10 до 45
Влажность Не допускать конденсат и капли воды
Дополнительные условия Не допускать проводящих газов и защищать от пыли
Размеры 75 х 50 х 35 мм
1. Разьемы
Маркировка ОписаниеCLK+, CLK- Положительный и отрицательный выводы входа тактового сигнала
CW+, CW- Положительный и отрицательный выводы входа управления
направлением вращения
EN+, EN- Положительный и отрицательный выводы входа разрешения работы
+24D, GND Положительный и отрицательный выводы подключения питания
A+, A- Выводы подключения I фазной обмотки двигателя
B+, B- Выводы подключения II фазной обмотки двигателя
2. Схемы подключения
Управляющие входы можно подключить к портам контроллера двумя способами. Зависит от конфигурации и исполнения портов контроллера (Рис.1, Рис.2).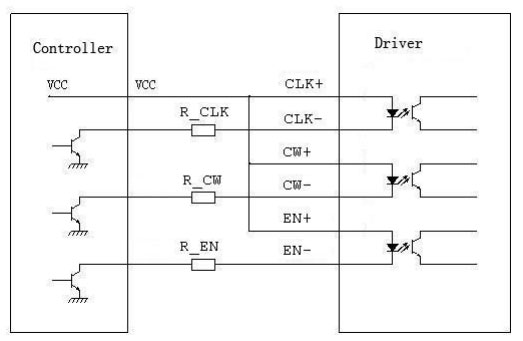
Рис.1. Пример подключения драйвера при исполнении порта контроллера на NPN ключах с открытым коллектором.
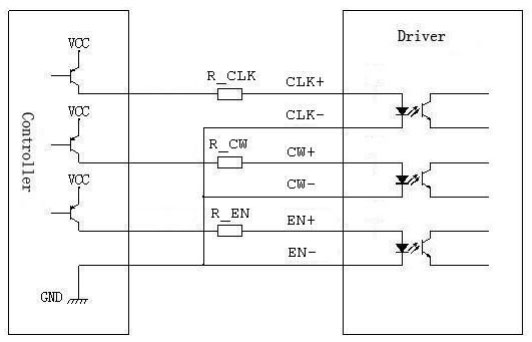
Рис.2. Пример подключения драйвера при исполнении порта контроллера на PNP ключах с открытым коллектором.
Примечание:
Значение сопротивлений R_CLK, R_CW и R_EN зависят от питающего напряжения VCC:
- При VCC=5 В, R_CLK = R_CW = R_EN = 0;
- При VCC=12 В, R_CW = R_EN = 1кОм, R_CLK = 1.5 кОм;
- При VCC=24 В, R_CW = R_EN = 2кОм, R_CLK = 3 кОм.
3. Настройка DIP переключателей
3.1. Делитель шага (микрошаг) устанавливают переключателями S3, S4 в соответствии с таблицей: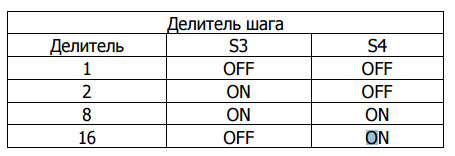
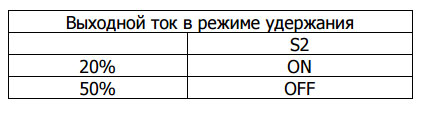
3.2. Установка тока в режиме покоя определяется переключателем S2. Таблица соответствия:
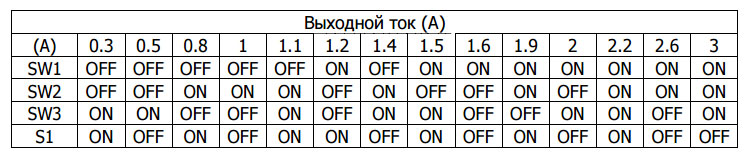
3.3. Установка выходного тока Переключатели SW1-SW3, S1 устанавливают выходной ток в режиме вращения. Таблица соответствия:
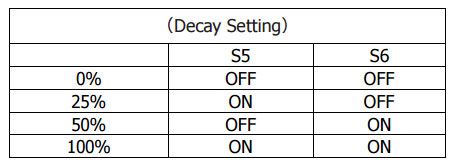
3.4. Затухание дискретных импульсов (Decay)
В драйвере есть возможность подстраивать форму дискретных импульсов для формирования сглаженного сигнала, приближенного к синусоиде. Необходимость возникает из-за разности параметров двигателей и их режимов. Параметр указывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) - Decay = 0%, для треугольного - Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации. Таблица соответствия:
4. Силовые цепи
Допускается последовательное и параллельное включение шаговых двигателей. При параллельном включении выходной ток необходимо устанавливать выше. При последовательном включении ток устанавливается как для одного двигателя.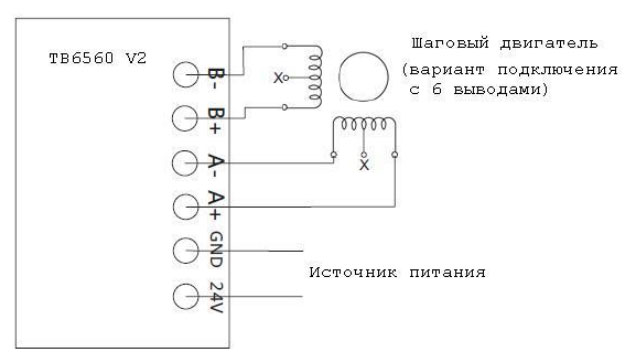
Рис.3. Подключение силовых цепей
5. Монтаж драйвера
При монтаже необходимо соблюдать следующие требования:- Удаленность от других элементов – не менее 20 мм;
- Отсутствие вблизи нагреваемых элементов;
- Место монтажа должно быть защищено от пыли, агрессивных газов, масляного тумана, влажности и сильной вибрации.
6. Световые индикаторы
- Power: индикатор питания;- Run: индикация режима работы.
7. Прикладное применение
Полная система управления шаговым двигателем должна содержать драйверы шаговых двигателей, шаговые приводы, источник питания постоянного тока и контроллер. Описание драйвера шагового двигателя на м/сх Toshiba TB6560 в формате PDF
Описание драйвера шагового двигателя на м/сх Toshiba TB6560 в формате PDF